mapping
Local
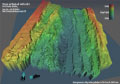
We will be using the Autonomous Benthic Explorer (ABE) to provide a detailed map of the Endeavour axial valley and off-axis areas to the northeast. ABE is an autonomous underwater vehicle (AUV), which means that it swims freely beneath the surface. It is equipped with a sonar system called the SM2000, a sophisticated echo sounder that sends out acoustic signals at 200kHz. The acoustic signals bounce off the seafloor and return to ABE, and the time difference between the sent and returned signal can be converted into a seafloor depth and then into a very detailed map of the area. At the same time that ABE is collecting information about the topography of the seafloor, it can also collect information on the chemistry and temperature of the water that it is flying through and on the magnetic properties of the seafloor rocks.
ABE can be preprogrammed to “fly” overlapping survey lines at a constant altitude above the seafloor. It drives through the water using a series of thrusters, allowing it to go up and over ridges, maneuver in any direction, and maintain its height above bottom even when pushed around by intense hydrothermal plume updrafts. When we plan an ABE survey, we begin by choosing an height above bottom. This altitude dictates how much coverage and detail we get from the seafloor. When ABE flys < 50 meters high, it will create a 100 m wide swath (footprint on the acoustic signal) of bathymetry that can show seafloor features as little as 1-3 m across. When it flys at 150 m, it gets a 300 m wide swath with a seafloor resolution of ~5-10 m. For our initial surveys, we will fly at 150 m to cover a larger portion of the seafloor. Later ABE surveys might be flown at 50 m, to zoom in on exciting topographical features. After choosing an altitude, we lay out a series of parallel survey or track lines such that they cover the area we believe the field to be in. The spacing between the track lines is calculated so that the swath width overlaps a bit with the previous track. In this way, the bathymetry of the seafloor can be 100% covered.
Before ABE is ready to go in the water, navigation beacons need to be placed on the seafloor so that ABE can tell where it is. We set out a series of moored acoustic transponders along the axial valley, which provide a way to determine very accurately where ABE is beneath the surface of the ocean. After the transponders are deployed, the ship locates them very accurately using information from satellites within the Global Positioning System network. When this navigation network is finished, we will able to locate ABE’s position in the water above the seafloor.